在當(dāng)今數(shù)字化與智能化飛速發(fā)展的時(shí)代,精確的室內(nèi)定位已成為工業(yè)自動(dòng)化、智慧倉(cāng)儲(chǔ)、醫(yī)療看護(hù)、零售體驗(yàn)及公共安全等諸多領(lǐng)域的核心需求。傳統(tǒng)的GPS衛(wèi)星定位在室內(nèi)環(huán)境中信號(hào)嚴(yán)重衰減,無(wú)法滿(mǎn)足厘米級(jí)高精度與穩(wěn)定性的要求。而超寬帶(Ultra-Wideband, UWB)技術(shù),憑借其獨(dú)特的物理特性,正成為解決這一難題的關(guān)鍵,引領(lǐng)著室內(nèi)定位技術(shù)開(kāi)發(fā)的嶄新方向。
UWB技術(shù)原理簡(jiǎn)述
UWB技術(shù)并非通過(guò)傳統(tǒng)的連續(xù)載波傳輸數(shù)據(jù),而是發(fā)射持續(xù)時(shí)間極短(通常在納秒級(jí)別)的脈沖序列。這些脈沖占用的頻譜極寬(通常超過(guò)500MHz),但其功率譜密度極低,類(lèi)似于背景噪聲,因此對(duì)其他無(wú)線(xiàn)通信系統(tǒng)的干擾極小,且抗干擾能力極強(qiáng)。其核心定位原理主要包括以下兩種:
- 到達(dá)時(shí)間差法(TDoA): 這是目前主流的UWB定位方法。定位標(biāo)簽(Tag)發(fā)射UWB脈沖信號(hào),被多個(gè)已知位置的固定基站(Anchor)接收。由于信號(hào)到達(dá)不同基站的時(shí)間存在微小差異,通過(guò)計(jì)算這些時(shí)間差,可以構(gòu)建出多條雙曲線(xiàn),其交點(diǎn)即為標(biāo)簽的精確位置。此方法對(duì)基站間的時(shí)鐘同步要求極高,通常需要有線(xiàn)網(wǎng)絡(luò)或高精度無(wú)線(xiàn)時(shí)鐘同步協(xié)議支持。
- 飛行時(shí)間法(ToF): 通過(guò)精確測(cè)量UWB脈沖信號(hào)在標(biāo)簽與單個(gè)基站之間往返一次的傳播時(shí)間,直接計(jì)算出兩者之間的距離。通過(guò)與三個(gè)或以上基站測(cè)距,再利用三邊定位算法即可解算出標(biāo)簽的二維或三維坐標(biāo)。此方法無(wú)需基站間嚴(yán)格同步,但要求標(biāo)簽與基站進(jìn)行雙向通信,功耗相對(duì)較高。
UWB室內(nèi)定位系統(tǒng)的技術(shù)優(yōu)勢(shì)
與Wi-Fi、藍(lán)牙(如BLE)等基于信號(hào)強(qiáng)度(RSSI)的定位技術(shù)相比,UWB在室內(nèi)定位方面展現(xiàn)出顯著優(yōu)勢(shì):
- 厘米級(jí)高精度: UWB脈沖的極短時(shí)間特性使其能夠進(jìn)行亞納秒級(jí)的時(shí)間分辨率測(cè)量,從而將測(cè)距誤差控制在10厘米以?xún)?nèi),甚至可達(dá)厘米級(jí)。
- 強(qiáng)抗干擾與多徑分辨能力: 寬頻帶信號(hào)使其能夠區(qū)分直達(dá)路徑與經(jīng)過(guò)反射、繞射的延遲信號(hào),在復(fù)雜多徑的室內(nèi)環(huán)境中表現(xiàn)穩(wěn)定。
- 高實(shí)時(shí)性: 數(shù)據(jù)傳輸速率高,定位更新頻率可達(dá)每秒數(shù)十次甚至上百次,能夠?qū)崟r(shí)跟蹤快速移動(dòng)的物體或人員。
- 高安全性: 極低的功率譜密度使其難以被截獲和干擾,通信安全性好。
- 低功耗: 脈沖發(fā)射的占空比極低,使得UWB標(biāo)簽在保持高精度定位的可以實(shí)現(xiàn)長(zhǎng)達(dá)數(shù)年的電池續(xù)航。
系統(tǒng)架構(gòu)與開(kāi)發(fā)關(guān)鍵點(diǎn)
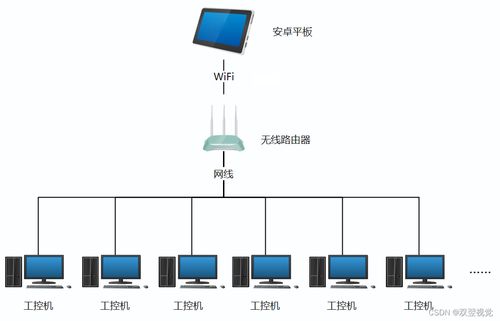
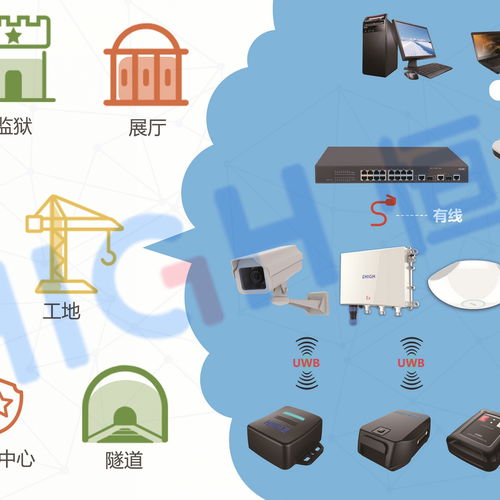
一個(gè)典型的UWB室內(nèi)定位系統(tǒng)通常由硬件層、定位引擎和業(yè)務(wù)應(yīng)用層構(gòu)成。
- 硬件層: 包括UWB基站(Anchor,負(fù)責(zé)接收信號(hào)和/或發(fā)射同步信號(hào))、UWB標(biāo)簽(Tag,附著于待定位的人或物)以及用于數(shù)據(jù)傳輸和時(shí)鐘同步的骨干網(wǎng)絡(luò)(通常是以太網(wǎng)或?qū)S脽o(wú)線(xiàn)鏈路)。芯片方案提供商如Qorvo(收購(gòu)了Decawave)、NXP、蘋(píng)果(U1芯片)等推動(dòng)了硬件的標(biāo)準(zhǔn)化與低成本化。
- 定位引擎(核心算法層): 這是技術(shù)開(kāi)發(fā)的核心。它接收來(lái)自硬件的原始測(cè)量數(shù)據(jù)(時(shí)間戳、信道脈沖響應(yīng)等),通過(guò)復(fù)雜的濾波算法(如卡爾曼濾波、粒子濾波)和定位解算算法(如最小二乘法),將原始數(shù)據(jù)轉(zhuǎn)化為穩(wěn)定、平滑的坐標(biāo)數(shù)據(jù)。開(kāi)發(fā)難點(diǎn)在于處理非視距(NLOS)誤差、時(shí)鐘漂移以及復(fù)雜環(huán)境下的數(shù)據(jù)融合。
- 業(yè)務(wù)應(yīng)用層: 將獲得的坐標(biāo)數(shù)據(jù)與具體的行業(yè)場(chǎng)景結(jié)合,開(kāi)發(fā)出上層應(yīng)用,如資產(chǎn)追蹤管理系統(tǒng)、人員安全區(qū)域管控、AGV導(dǎo)航調(diào)度、VR/AR空間交互等。
挑戰(zhàn)與未來(lái)展望
盡管優(yōu)勢(shì)明顯,UWB室內(nèi)定位的規(guī)模化部署仍面臨挑戰(zhàn):基站部署的工程復(fù)雜度與成本、不同廠商設(shè)備間的互操作性、與現(xiàn)有Wi-Fi/BLE/5G網(wǎng)絡(luò)的融合定位等。技術(shù)開(kāi)發(fā)將趨向于:
- 芯片集成化與低成本化: UWB功能將進(jìn)一步集成到手機(jī)、物聯(lián)網(wǎng)設(shè)備的主芯片中。
- 多技術(shù)融合定位: 結(jié)合UWB(提供精確定位)、BLE/Wi-Fi(提供粗定位和輔助識(shí)別)及慣性測(cè)量單元(IMU,彌補(bǔ)信號(hào)遮擋時(shí)的航位推算),實(shí)現(xiàn)全場(chǎng)景、高魯棒性的融合定位方案。
- AI賦能: 利用機(jī)器學(xué)習(xí)算法優(yōu)化定位模型,自適應(yīng)學(xué)習(xí)環(huán)境特征,進(jìn)一步提升在復(fù)雜動(dòng)態(tài)環(huán)境下的定位精度和可靠性。
UWB技術(shù)為室內(nèi)高精度定位提供了一種近乎完美的物理層解決方案。隨著產(chǎn)業(yè)鏈的成熟和生態(tài)的完善,它必將作為未來(lái)智能空間不可或缺的“感官神經(jīng)”,深刻變革各行各業(yè)的運(yùn)營(yíng)與管理模式,驅(qū)動(dòng)數(shù)字經(jīng)濟(jì)向更深層次發(fā)展。